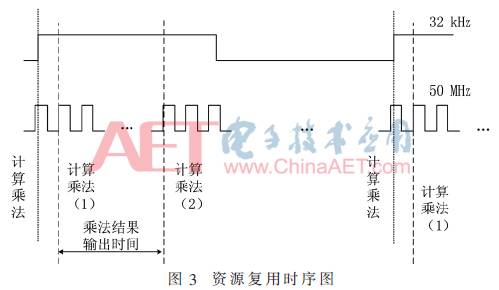
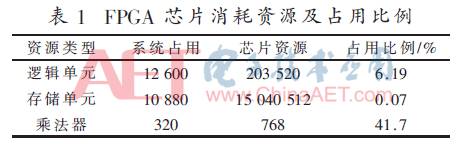
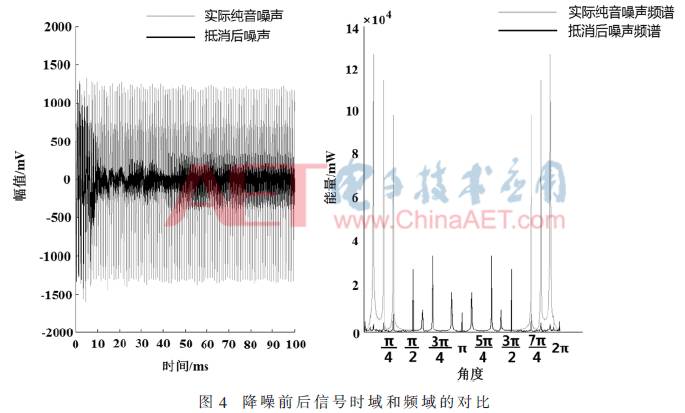
Keywords: acoustics; narrowband ANC; FPGA; parallel FxLMS algorithm; resource reuse CLC number: TN98; O422.8 Document identification code: A DOI: 10.16157/j.issn.0258-7998.170182 Chinese citation format: Jiang Yucheng, Guan Tian, ​​Wang Jiafei. FPGA implementation of narrowband noise active control system[J].Application of Electronic Technique, 2017, 43(9): 61-63, 67. English reference format: Jiang Yucheng, Guan Tian, ​​Wang Jiafei. The FPGA implementation of narrowband active noise control system [J]. Application of Electronic Technique, 2017, 43 (9): 61-63, 67. 0 Preface Noise pollution is widespread in industrial production and daily life, and periodic noise, such as noise from rotating or reciprocating equipment such as engines, compressors, fans and propellers, is also common [1]. Since its noise energy is concentrated in a specific frequency band, it is called narrowband noise. With the advancement of electronic technology, active noise control technology has gradually developed. Compared with traditional passive noise control, active noise control has the advantages of low cost and high flexibility [2]. Moreover, the narrowband noise is different from the broadband noise, and its frequency value can often be collected by non-acoustic sensors, thus avoiding the acoustic feedback problem, and is more suitable for the active control method [3]. At present, the main implementation of active noise control system engineering is DSP processor, which has the advantage that the related driver is mature and the chip cost is low [4]. However, as the frequency of the narrowband noise increases, the required audio sampling rate also increases, so the amount of calculation will increase accordingly, and the calculation speed of the DSP will become a bottleneck. Therefore, the scenarios applied by the current active noise control system are low frequency noise [ 5]. In order to be able to actively control high-frequency noise, and also to cope with the multiplication of multi-frequency and multi-channel situations, the system uses FPGA with strong parallel computing power as the core processor and narrowband of parallel structure. The feedforward FxLMS algorithm is used for engineering implementation and actual testing. In addition, considering the parallel structure algorithm for the consumption of multiplier resources, this paper uses the multiplier resource reuse technology [6], which greatly reduces the system cost and facilitates the actual engineering application of the system. 1 FxLMS algorithm analysis and improvement 1.1 Narrowband feedforward FxLMS algorithm There are two implementation methods for the feedforward ANC system, the main difference being the source of the reference signal [2]. Although the algorithm for collecting primary noise as a reference signal with an acoustic sensor can be actively controlled for wideband and narrowband noise, the acoustic feedback problem can seriously affect the stability of the algorithm. Therefore, the system designed in this paper only targets narrow-band noise signals, so that non-acoustic sensors such as accelerometers and tachometers can be used to collect and calculate the main frequency of the noise signal, and then generate reference signals inside the system. The structure of the narrowband feedforward FxLMS algorithm is shown in Figure 1. The algorithm mainly includes the generation of reference signals, off-line identification of secondary acoustic channels and LMS adaptive filtering [7]. In Figure 1, W(z) represents the FIR filter, P(z) represents the primary acoustic channel, and S(z) represents the secondary acoustic channel from the secondary noise digital-to-analog conversion to the microphone acquisition to the audio data. 1.2 Parallel Structure FxLMS Algorithm In practice, narrowband noise often also includes higher harmonics of its fundamental frequency or other higher frequency components. In order to solve this problem, the sinusoidal signal generator in the previous section can include a plurality of corresponding frequency components, which has the advantages of simple algorithm structure and low resource consumption. But at the same time, it will bring a serious problem, that is, when the difference of the frequency components in the noise is large, the same step factor μ cannot make all the frequencies reach the optimal convergence state, and oscillation or non-convergence may occur. When the difference of frequency components is small, the order of the adaptive filter needs to be long enough to meet the high resolution of adjacent frequencies, which leads to problems such as slow convergence speed and large quantization error [2]. Therefore, the best way to solve this problem is to process each frequency component separately, that is, adopt the parallel structure FxLMS algorithm. The algorithm structure is shown in Figure 2. The coefficient adjustment formula of the adaptive algorithm is: In the FxLMS algorithm of the parallel structure, sinusoidal reference signals of different frequencies are processed by their corresponding adaptive filters. All filter output signals are summed as a secondary noise signal to cancel the primary noise. By separating the different frequency components in the noise in this way, the stability and convergence speed of the system are significantly improved, and the flexibility of the system application is increased. Compared with the general structure of the FxLMS algorithm, the parallel structure algorithm will multiply the occupation of system resources, but this deficiency can be overcome by the resource reuse technology adopted in the system FPGA implementation process. 2 ANC system construction and implementation There are two reasons why the system uses an FPGA as a signal processor. The first is to implement the hardware in the algorithm, the operation speed is faster, which is conducive to building a real-time processing system. Secondly, by utilizing the advantages of FPGA parallel computing, the existing ANC system can be expanded into multiple channels by simple copying, so that the system can be applied. For more practical scenarios. However, when FPGA implements digital signal processing algorithms, especially algorithms with many multiply-add operations such as filters, the internal multiplier resource consumption will be large, and the selection of FPGA models with a large number of multipliers will greatly increase the system cost. Therefore, in order to improve the practicality of the ANC system, it is necessary to multiplex the multiplier inside the FPGA. 2.1 Multiplier resource reuse technology Considering that the operating clock of the FPGA in the system is 50 MHz, and the sampling clock of the audio module is 32 kHz, the condition that the system clock frequency is much larger than the data clock frequency is satisfied. Therefore, the multiplier is multiplexed by a method of converting a multiplication portion which is performed in parallel at the same time into a serial calculation, so-called time multiplexing. The timing process of time multiplexing is shown in Figure 3. Assuming that there are N parallel filters of order M, then when the rising edge of the data clock comes, it is necessary to calculate N × M multiplication results, that is, N × M multipliers are required. If the multiplexing technique is adopted, the multiplier accepts the unified scheduling of the controller after the data is valid, and calculates the multiplication operation of each filter in the stage one by one, as long as the time interval of the two multiplication operations is greater than the time of the multiplier output result, The output of the N multipliers serial calculation is correct. Thus, the number of multipliers consumed by the parallel filter is reduced to M, which greatly saves the multiplier resources. Since the system performs multiplier multiplexing on the same type of algorithm module, a simple counter can be used to implement scheduling control, that is, the system clock starts counting after the data is valid, and the multiplication of each algorithm module is performed at different count values. At the same time, the multiplication results are output at different count values. 2.2 System Analysis The function completed by the ANC system implemented in this paper is to actively control the three main frequency components in the environmental noise to achieve the overall noise reduction. The noise reduction algorithm is implemented by three parallel FxLMS filters. If the resource multiplexing technique is not used, in addition to the secondary acoustic channel identification, the algorithm requires three 128-order FIR filters and three 64-order LMS adaptive filters. In theory, a total of 960 multipliers are required. Due to the multiplexing technique, the system algorithm includes a 128-order secondary acoustic channel identification module, a three-input three-output 128-order FIR filter, and a three-input three-output 64-order LMS adaptive filter. 320 multipliers are available, saving twice the multiplier resources before multiplexing. The FPGA chip used in the system is EP3SE260F1152C2 in the Stratix III series of Altera Corporation. The resources and ratios consumed by the system are shown in Table 1. It can be seen from Table 1 that the resources of the FPGA can meet the requirements of the algorithm, and the whole system can work normally after debugging. 3 Results analysis The actual application test of the built ANC system is carried out. The primary noise used in the test is a narrowband noise signal from the speaker. The main frequencies are 1 000 Hz, 2 000 Hz and 3 000 Hz. Before the ANC system works, the sound collected by the pickup is the primary noise. After the ANC system works, the sound collected by the pickup is the error noise signal after the primary noise and the secondary noise are superimposed. By comparing the time domain and the frequency domain of the signals collected by the ANC system before and after the operation, it can be judged whether the expected system function is realized. The test signal frequency is tested to be substantially the same as the noise frequency, ie the frequency components of the reference signal are 1 000 Hz, 2 000 Hz and 3 000 Hz. Figure 4 shows the comparison of the time domain and frequency domain of the noise signal before and after the ANC system works. The convergence time is defined as the time when the amplitude of the error noise signal in the time domain waveform is reduced to less than 20% of the primary noise amplitude. The analysis of the noise time domain waveform can be used to obtain the convergence time of the ANC system without frequency offset. It is 12.5 ms. Analysis of the frequency domain plot shows that the system can achieve attenuation of 15.5 dB, 14.3 dB, and 11.0 dB for frequency components of 1 000 Hz, 2 000 Hz, and 3 000 Hz, respectively, without frequency offset. The result of the DSP-based FxLMS algorithm in the active control test of automobile engine noise is 13.5 dB [10]. It can be seen that the system implemented in this paper has obvious advantages in noise reduction effect and function expansion. 4 Conclusion This paper presents a design method of FPGA-based narrowband noise active control system. The system overcomes the shortcomings of the traditional ANC system for low-frequency narrow-band noise control applications, making it more suitable for practical applications. In addition, the application of resource reuse technology greatly reduces the system's consumption of FPGA multiplier resources and reduces system cost. Due to the parallelism of the FPGA, the system can be applied to the environment of multi-frequency multi-channel noise active control through module replication. The effectiveness of the system noise control is verified by actual testing of the system. By combining with different noise frequency analysis algorithms, the system can be applied to a variety of narrowband noise control fields. For example, for the active control of engine noise in the car, the main engine noise can be analyzed by real-time collecting the engine signal, and then the system proposed in this paper can be actively controlled. However, the internal parameters of the system adaptive algorithm, including the filter order and the algorithm step factor, are determined by simulation experiments, and a unified selection method is not formed. Further research is needed to improve the actual system. Application range. Auto Radiator,Car Radiator,Car Coolant,Car Engine Coolant Huangshan Kaichi Technology Co.,Ltd , https://www.kaichitech.com
 [8], in order to compensate for the influence of the secondary acoustic channel, the FxLMS algorithm needs to obtain an M-order FIR estimate of the secondary acoustic channel S(z). Assuming that the secondary acoustic channel is a time-invariant system, an offline identification method can be employed. In the dotted line box in Figure 1, the offline identification module used by the system is used. The transfer function of the secondary acoustic channel after stabilization is:
[8], in order to compensate for the influence of the secondary acoustic channel, the FxLMS algorithm needs to obtain an M-order FIR estimate of the secondary acoustic channel S(z). Assuming that the secondary acoustic channel is a time-invariant system, an offline identification method can be employed. In the dotted line box in Figure 1, the offline identification module used by the system is used. The transfer function of the secondary acoustic channel after stabilization is: 


Design of Narrowband Noise Active Control System Based on FPGA
Abstract: Based on FPGA, the narrow-band noise active control system adopts FPGA with strong parallel computing capability as the core processor, which can cope with the multiplication of multi-frequency and multi-channel conditions. The system realizes the narrow-band feedforward FxLMS with parallel structure. The algorithm can perform active control for different frequency components in the noise separately. The parallel structure algorithm consumes a lot of multiplier resources, so a multiplier resource reuse technique is proposed. The multiplier resources used to implement the three-channel algorithm are reduced to 33.3%, which greatly reduces the system cost and facilitates the wide application of the system.