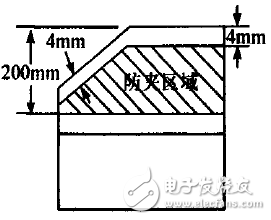
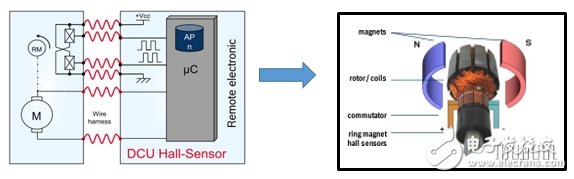
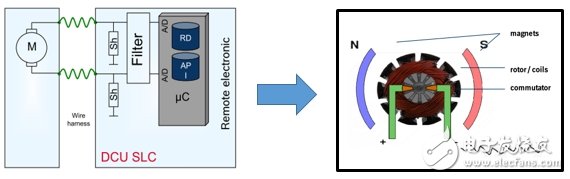
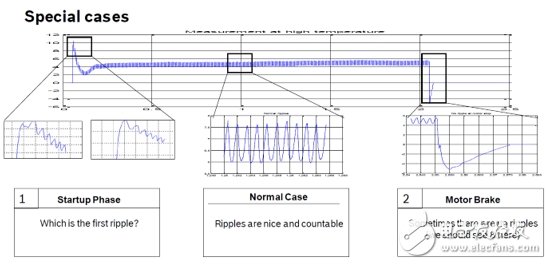
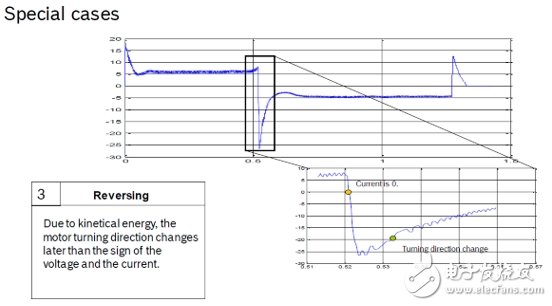
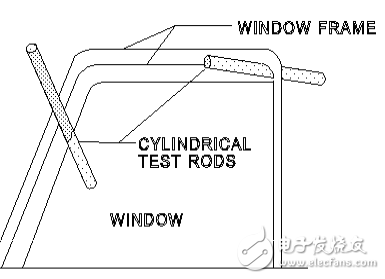
With the development of the automotive industry, automotive electronic components are increasingly being used in modern automobiles, providing better safety, comfort and economy for automobiles. In the past, cars generally used hand cranks to raise or lower the window glass. Many cars are now equipped with electric windows. The electric window with anti-pinch function was applied to the car in the 1990s. When the glass encounters the human obstacle, it will automatically recognize and reverse the operation to prevent the occupant from pinching and realize the anti-pinch function. Due to the importance of this function, it has become a standard configuration in new models in Europe and America. At present, the newly launched high-end models in China have become standard equipment. Due to the introduction of low-cost solutions, economic cars have begun to be gradually equipped with this function. The accurate judgment of the position of the window is a prerequisite for the normal realization of the anti-pinch function of the window. Regulations stipulate that windows with automatic ascent function must be equipped with automatic anti-pinch function. That is, if the window is in the process of automatic ascent, if the window glass encounters an obstacle. It must be judged and reversed, and the anti-clamping force should be less than 100 N. The anti-pinch area specified by the regulations is 4 mm to 200 mm (see Figure 1). This requires the system to accurately calculate and judge the position of the window. Figure 1 Legal anti-pinch area If the window position calculation is not accurate, the following consequences will result: 1) For example, if the window is in the anti-pinch area during the ascent, if the window position calculation is not accurate, the system judges to be outside the anti-pinch area. The window may encounter obstacles, but no anti-pinch reverse. Instead, continue to rise the glass. If the obstacle is a person, it will cause a person to be pinched. Figure 2 Anti-pinch window 2) During the automatic rise of the window, if the calculation of the window position is not accurate, the window will be in the top position and it will be considered to be in the anti-pinch area. The window cannot be closed. 3) During the ascent of the window, due to factors such as the weight of the window and the resistance of the window frame, the resistance at each position is not the same. Therefore, judging the position of the window is also very important. From the above three points analysis, it is known that the accuracy of the window position determination is very important in the anti-pinch function. From the mechanical point of view, when the electric window is raised and lowered, the rotation of the motor will drive the movement of the wire rope, thereby driving the window to open and close. Each time the motor rotates at a certain angle, the wire rope moves correspondingly for a certain stroke, so the stroke of the window movement is linearly related to the number of rotations of the motor. By calculating the number of turns of the motor, the position of the window can be calculated indirectly. 2.1 Hall principle The rotation of the motor causes the Hall sensor to generate a pulse signal. The detection of the glass position is achieved by counting the square waves emitted by the Hall Sensors in the control module. In the software design, the number of pulses during the operation of the window is recorded by the input capture function of the single chip chip. By learning, the upper seal of the window is recorded as position 0, and the lower seal is the maximum position. The position counter is decremented by 1 during the window rise, the position counter is cleared to 0 when it is raised to the top, and the position counter is incremented by 1 when it is lowered. Therefore, the value of the position counter corresponding to the limit of the anti-pinch zone can be determined as required. The position of the glass can be indirectly determined by detecting the value of the position counter. Figure 3 Hall principle The key problem of the pulse counting method is that the position recording should be accurate, but in the test, there are still several pulses that will still be emitted after the motor is cut off. These pulses are caused by inertia, and the number of pulses generated by different glass lifters different. The effect of these pulses on the position of the window does not vary from case to case. When the upper and lower ends of the window are blocked, these pulses are unlikely to cause a change in the position of the window, and when the intermediate position is stopped, the position of the window may be moved, especially when the position is stopped artificially. Bigger. To reduce this effect, these pulses are captured in the algorithm, as is the position count when the motor is energized. If the current state is the falling state, the pulse generated after the motor is powered off is subjected to the position addition operation. If the current state is the rising state, the pulse generated after the motor is powered off is subjected to the position subtraction operation. 2.2 Ripple principle The motor has a magnetic pole, a rotor coil, and a commutator. According to the right-hand rule, the rotor coil is energized and then the magnetic field of the magnetic pole acts to generate motion. When moving to the edge of the magnetic field, the magnetic field becomes weak, the electromotive force decreases, and the current increases. The commutator changes the direction of the current of the rotor coil, re-enters the magnetic field and the electromotive force increases, and the current decreases. The rotor coil is constantly rotating, and the electromotive force and current are constantly changing, so that ripple is continuously generated. Therefore, ripple is an inherent characteristic of the motor. By calculating the number of ripples, the number of rotor commutations can be calculated, and the relative position of the window can be calculated. The speed of the motor can be obtained by combining the time. Figure 4 Ripple principle The ripple characteristics of the motor are not obvious when starting, stopping, reversing, and blocking. As shown in Figures 5 and 6, the number of ripples cannot be accurately counted. It can only be compensated by an algorithm. Such ripple counts must be inconsistent with the actual inevitable. And this error will accumulate as the number of window operations increases. Figure 5 Special scene one Figure 6 Special scene two Protection against mechanical noise requirements and life of the motor mechanism for comfort. It is often required that the window to the top and stop to do a soft stop, that is, not to stop the stop, but to accurately determine the position of the window, stop the output of the motor when approaching the top or bottom, and close the window by inertia. . After the operation of the window through several times, the soft stop is closed, and the position of the window is blocked and the error accumulation is eliminated. This poses a greater challenge to the accuracy of the window position determination. 3.1 Hall comparison method In the early stage of software development, Hall motor was used to develop the ripple counting algorithm. Develop 2 sets of algorithms. A set of Hall counts. A set of ripple counts. The window position reference is made by the Hall count value. To correct the ripple count. Provides a reference for ripple compensation and calibration. Through multiple experiments in combination of high and low temperature and low pressure, if the position of the window and the ripple count obtained by the Hall count are different, the position of the window is made. If it is always less than 4 mm throughout the experiment. Then the ripple calculation algorithm can be considered accurate. This method is suitable for the algorithm development stage, which is very convenient for developers, and is convenient for algorithm optimization and calibration value selection. However, because the accuracy of the Hall sensor is not high, (generally, one Hall sensor will be equipped with two Hall sensors, one for calculating the number of Hall square waves and one for phase to judge the steering of the motor), so the Hall method itself There will also be some errors. Can only be used as a reference. The true ripple anti-pinch lifter has no Hall sensor during the product phase. 3.2 4 mm anti-clip method after multiple times of top and bottom operation The error clearing strategy of the ripple count with the soft stop function is often the stalling learning after the window operation has passed a calibration value n (the first n stops to make a soft stop, the error will accumulate). Therefore, we can operate the lifting window through n to the top and bottom, so that the window does not block the learning to eliminate the accumulated error. After the n+1th time, take a 4 mm test bar on the top of the window (as shown in Figure 7.) and let it do 4mm anti-pinch reversal. If the reverse rotation can be blocked, then the 4 mm test rod should be removed, the automatic window lift should be performed, and if it can also complete the automatic lifting and closing the window. It can be explained that the ripple counting algorithm is more accurate. Why do you need to confirm whether the window can be closed automatically after the n+1th back-proof clip is reversed? Since the n+1th anti-pinch reversal may be that the error is a downward error, for example, at 4 mm, the software algorithm may consider it to be 10 mm or otherwise. Then, in the case of a large error, the pinch inversion can also be prevented. In this case, when the automatic rise is performed, it may be mistaken for the anti-pinch area at the position of the window 0, which causes the top of the window to be closed and the anti-pinch reversed, which causes the closed window to be dissatisfied. If the error is upward biased, such as at 10 mm, the ripple counting algorithm considers it to be in a non-anti-clamping region of less than 4 mm, and no anti-clip reversal is performed. Then the window will stop lifting the window at the 4 mm bar. This method is simple and straightforward, does not require too many test tools, and is highly operative and suitable for the entire process. Very suitable for test personnel to test the test. Figure 7 4 mm anti-pinch test 3.3 Ripple count clearing judgment method In the ripple counting algorithm, there must be variables in the software to represent the number of ripples or the position of the window. Regardless of the strategy, the cumulative error of the ripple must be eliminated. Then the previous value in eliminating the clear 0 is the cumulative value of the error. By monitoring this value. If this value always corresponds to the window position is less than 4 mm, then this ripple counting algorithm is definitely accurate. This method has the highest accuracy and is applicable to the entire process. But you need to use more of the other output display tools. More suitable for developers. Not convenient for testers. This paper first expounds the importance of the accuracy of the position determination of electric windows, and then introduces the judgment principle of the position of the electric window based on Hall and based on current detection. Three methods for judging the accuracy of the position of the electric window based on the ripple are enumerated in detail. As can be seen from the full text, the accuracy of the judgment of the position of the power window greatly affects the normal realization of the anti-pinch function of the window. Therefore, I hope that the contents of this document can give domestic automakers and suppliers some reference in the development and evaluation of anti-pinch power windows. Silent Diesel Gensets, 3000KW Diesel Generators, 4000KW Diesel Generators,4000KW Silent Diesel Genset Jinan Guohua Green Power Equipment Co.,Ltd. , https://www.guohuagenerator.com